Towards new horizons
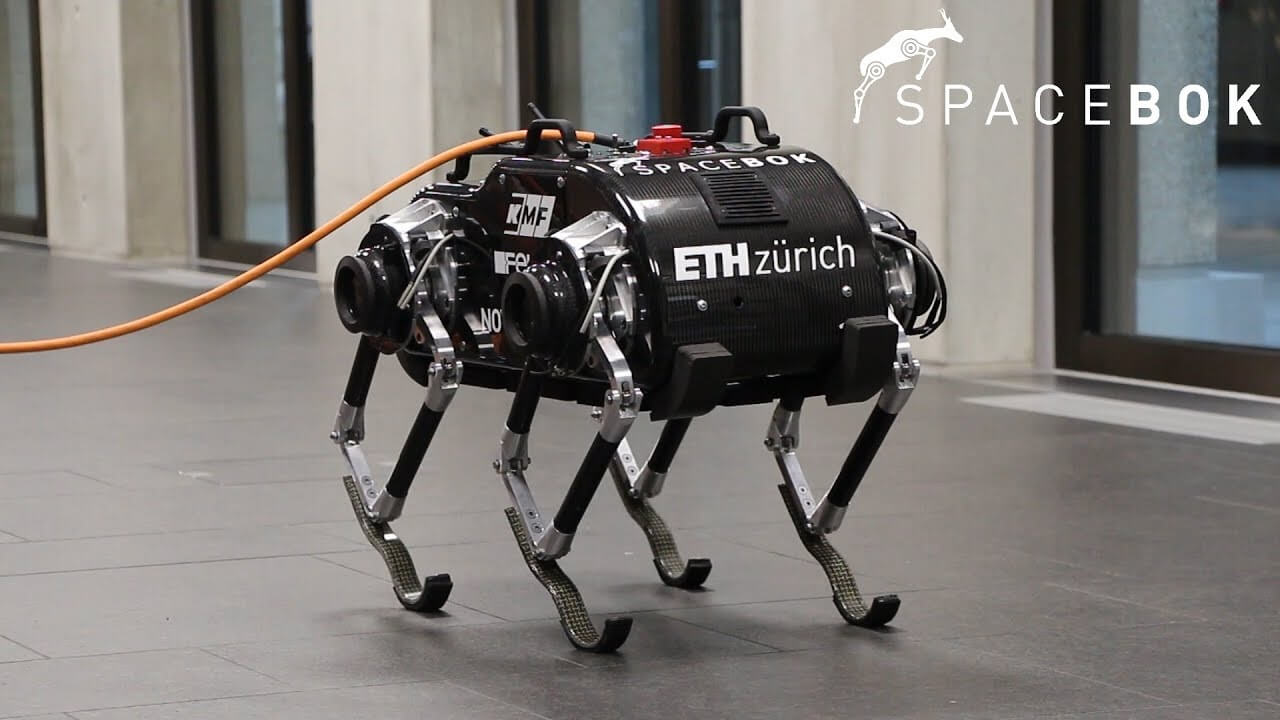
Many rovers have allowed us to explore new worlds. Like the Moon or Mars, for example. Incredible discoveries have been made with these four-wheeled machines, but their travel capabilities are still limited. To expand our horizons in a low-gravity environment, young Swiss researchers from ETH Zurich and ZHAW Zurich are developing SpaceBok, a four-legged robot capable of leaping like an antelope.
The idea for this robot, currently being tested at the ESTEC ESA Technical Center in the Netherlands, came to them from Apollo missions astronauts who went to the moon. Once on the surface, they quickly realized that jumping was a natural and effective way to get around. It was instinctive (even if it was sometimes a bit of a pain).
“Instead of static walking, where at least three feet remain permanently on the ground, dynamic walking allows complete flight phases during which all the feet are off the ground,” says Hendrik Kolvenbach, lead author of the study. The animals use dynamic gaits because of their efficiency, but until recently, the computing power and the algorithms necessary for the control made it difficult to realize them on robots ».
Bonds 2 meters high
Since then, many technological advances have been made. So why deprive yourself? SpaceBok, on paper, could potentially reach two meters high in lunar gravity. Of course, there are still many challenges ahead. Once unstuck, the robot must find a way to stabilize to descend and land safely. This is what researchers are currently working on. To facilitate its movements and reduce energy expenditure, it is also questioned that SpaceBok integrates springs to store the energy during the landing, and then release it on takeoff.
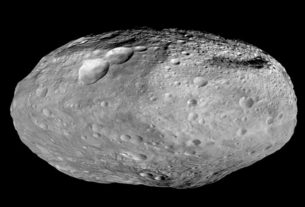
For now, this new robot can “jump” to a height of 1.3 meters simulated lunar mid-gravity. Remember that the lower the gravity, the longer the flight phase can be for each jump. This is why SpaceBok could also be very interesting for exploring asteroids